In this paper, we study the transport of polystyrene polymer. They are transported using non contact method. We use DC motor having rollers. The motor is connected to switched mode power supply (SMPS) and controller. The voltage of the SMPS is 12 V. The controller controls the voltage of the motor. We study voltage of the motor from 1 V to 8 V. The motor have capacity of 12 V. The current of the motor at 12 V are 1.2 A. The switched mode power supply have electrical plug. We supply 220 V AC supply to SMPS. They have AC to DC converter. Here, the length of the polystyrene is 2 cm, width 2 cm and thickness is 0.082 mm. The mass is measured. We observe the polystyrene do not move from 1 V to 4 V. The transport is from 0.2 cm to 3 cm under the application of 5 V to 8 V, respectively. Further movement are not observed. The multimeters are used to measure the current-voltage characteristics of the motor. They are used to measure the voltage of the SMPS. In this paper, we develop theory to understand the transport of polystyrene under the action of DC motor. We develop two neural network models. The data driven neural network and physics from theory informed in the neural network. The neural network model match the experiments. The accuracy is good. Our simulations use less computer power and time. The training time is 30 s and predict time is 0.07 s. Our work can find applications in printing, packaging, decor, energy, sensors and material handling industries.
| Published in | Engineering and Applied Sciences (Volume 11, Issue 2) |
| DOI | 10.11648/j.eas.20261102.11 |
| Page(s) | 48-64 |
| Creative Commons |
This is an Open Access article, distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution and reproduction in any medium or format, provided the original work is properly cited. |
| Copyright |
Copyright © The Author(s), 2026. Published by Science Publishing Group |
DC Motor, Polystyrene, Neural Network, Non-contact Transport, Mass Balance
Equipments | Specification details |
|---|---|
switched mode power supply (SMPS) | 12V |
Controller | 0 to 12 V controller using knob turns. Also read Table 2 |
DC motor having rollers | see Table 3 |
acrylic base | |
electrical wirings | |
terminals for the voltage measurement of the SMPS | multimeter wiring plugged for this purpose |
terminals for the voltage measurement of the controller | multimeter wiring plugged for this purpose |
terminals for the voltage measurement of the DC motor having rollers | multimeter wiring plugged for this purpose |
terminals for the current measurement of the DC motor having rollers | multimeter wiring plugged for this purpose |
All terminals are placed on the acrylic base. Electrical wirings are available | |
chart papers are placed on the acrylic table | Many |
books are placed next to the acrylic device unit to match the height. | three books |
polystyrene is placed on the array of papers | see Table 4 for the dimensions of the polystyrene |
knob turns in the controller | voltage of the motor (V) |
|---|---|
3 | 1 |
4 | 2 |
5 | 3 |
6 | 4 |
7 | 5 |
8 | 6 |
9 | 7 |
10 | 8 |
Voltage | 12V DC |
|---|---|
Diameter | 26 mm |
Speed | 18000 rpm |
Shaft type | Round type |
Shaft length | 12 mm |
Shaft Diameter | 2.3 mm |
Total body length | 5.7 cm |
Current | 1.2 A |
Experiment | CAD model | Geometry |
|---|---|---|
|
| L = 2 cm, B= 2 cm and H = 0.082 mm V =m3 |
Mass measurement set up | Size |
|---|---|
| L = 2 cm, B= 2 cm, H = 0.082 mm and V =m3 |
Polystyrene | Trial 1 (mg) | Trial 2 (mg) | Trial 3 (mg) | Trial 4 (mg) |
|---|---|---|---|---|
40 | 50 | 34 | 40 |
voltage of the DC motor having rollers (V) | current (A) | power (W) | time (s) | distance (m) |
|---|---|---|---|---|
1 | 0.64 | 0.64 | 30 | 0 |
2 | 0.71 | 1.42 | 30 | 0 |
3 | 0.76 | 2.28 | 30 | 0 |
4 | 0.82 | 3.28 | 30 | 0 |
5 | 0.85 | 4.25 | 7 | 0.2e-2 |
6 | 0.89 | 5.34 | 27 | 1e-2 |
7 | 0.92 | 6.44 | 16 | 2e-2 |
8 | 1.04 | 8.32 | 5 | 3e-2 |
voltage (V) | current (A) | power (W) | time (s) | distance (m) |
|---|---|---|---|---|
1 | 0.65 | 0.65 | 20 | 0 |
2 | 0.72 | 1.44 | 20 | 0 |
3 | 0.77 | 2.31 | 20 | 0 |
4 | 0.83 | 3.32 | 20 | 0 |
5 | 0.87 | 4.35 | 17 | 0.2e-2 |
6 | 0.93 | 5.58 | 32 | 1.2e-2 |
7 | 0.96 | 6.72 | 16 | 2e-2 |
8 | 1.08 | 8.64 | 8 | 3.1e-2 |
voltage (V) | current (A) | power (W) | time (s) | distance (m) |
|---|---|---|---|---|
1 | 0.64 | 0.64 | 40 | 0 |
2 | 0.71 | 1.42 | 60 | 0 |
3 | 0.78 | 2.34 | 60 | 0 |
4 | 0.81 | 3.24 | 60 | 0 |
5 | 0.88 | 4.4 | 26 | 0.1e-2 |
6 | 0.94 | 5.64 | 42 | 1e-2 |
7 | 1.03 | 7.21 | 20 | 2.3e-2 |
8 | 1.12 | 8.96 | 7 | 3e-2 |
voltage (V) | current (A) | power (W) | time (s) | distance (m) |
|---|---|---|---|---|
1 | 0.64 | 0.64 | 15 | 0 |
2 | 0.72 | 1.44 | 16 | 0 |
3 | 0.78 | 2.34 | 35 | 0 |
4 | 0.82 | 3.28 | 35 | 0 |
5 | 0.86 | 4.3 | 7 | 0.2e-2 |
6 | 0.92 | 5.52 | 24 | 1e-2 |
7 | 1 | 7 | 12 | 2.1e-2 |
8 | 1.14 | 9.12 | 5 | 3e-2 |
Armature voltage = 0.2 V |
Armature current = 0.61 A |
Armature resistance = 0.32 ohm |
V (volt) | Ia (A) | Power (W) | RA (ohm) | Eb (V) | Ke (V/(rad/s)) | ω (rad/s) | speed (rpm) | Torque (Nm) |
|---|---|---|---|---|---|---|---|---|
1 | 0.64 | 0.64 | 0.32 | 0.7952 | 0.0064 | 124.25 | 1187.102 | 0.004096 |
2 | 0.71 | 1.42 | 0.32 | 1.7728 | 0.0064 | 277 | 2646.497 | 0.004544 |
3 | 0.76 | 2.28 | 0.32 | 2.7568 | 0.0064 | 430.75 | 4115.446 | 0.004864 |
4 | 0.82 | 3.28 | 0.32 | 3.7376 | 0.0064 | 584 | 5579.618 | 0.005248 |
5 | 0.85 | 4.25 | 0.32 | 4.728 | 0.0064 | 738.75 | 7058.121 | 0.00544 |
6 | 0.89 | 5.34 | 0.32 | 5.7152 | 0.0064 | 893 | 8531.847 | 0.005696 |
7 | 0.92 | 6.44 | 0.32 | 6.7056 | 0.0064 | 1047.75 | 10010.35 | 0.005888 |
8 | 1.04 | 8.32 | 0.32 | 7.6672 | 0.0064 | 1198 | 11445.86 | 0.006656 |
rpm | rad/s |
18000 | 1884.96 |
Outer rotating rod of the motor diameter | Trial 1 | Trial 2 | Trial 3 | Trial 4 | Instrument used to measure |
|---|---|---|---|---|---|
3.6 mm | 3.6 mm | 3.6 mm | 3.6 mm | Micrometer |
Density of air | 1.225 kg/m3 |
Surface area of the polystyrene polymer | m2 |
Angular velocity of motor | 1198 rad/s |
Speed of motor | 11445.86 rpm |
rotating rod diameter | 3.6 mm |
Tangential velocity | 2.16 m/s |
Aerodynamic drag force | N |
coefficient of drag | 0.1 |
P (W) | t (s) | (J) | r (m) | (m/s) | m (kg) |
|---|---|---|---|---|---|
0.64 | 30 | 19.2 | 0.0018 | 0.23 | 3.4e-5 |
1.42 | 30 | 42.6 | 0.0018 | 0.5 | 3.4e-5 |
2.28 | 30 | 68.4 | 0.0018 | 0.78 | 3.4e-5 |
3.28 | 30 | 98.4 | 0.0018 | 1.05 | 3.4e-5 |
4.25 | 7 | 29.75 | 0.0018 | 1.33 | 3.4e-5 |
5.34 | 27 | 144.18 | 0.0018 | 1.61 | 3.4e-5 |
6.44 | 16 | 103.04 | 0.0018 | 1.89 | 3.4e-5 |
8.32 | 5 | 41.6 | 0.0018 | 2.16 | 3.4e-5 |
w (N) |
| (N) |
|
| (J) | (J) | E (J) | Theory s (m) | (m/s) |
|---|---|---|---|---|---|---|---|---|---|
3.34e-4 | 0.35 | 1.17e-4 | 9.03 | 0 | |||||
3.34e-4 | 0.35 | 1.17e-4 | 1.91 | 0 | |||||
3.34e-4 | 0.35 | 1.17e-4 | 0.78 | 0 | |||||
3.34e-4 | 0.35 | 1.17e-4 | 0.43 | 0 | |||||
3.34e-4 | 0.35 | 1.17e-4 | 0.27 | 8e-9 | 1.39e-12 | 2.33e-7 | 2.33e-7 | 2e-3 | 2.86e-4 |
3.34e-4 | 0.35 | 1.17e-4 | 0.18 | 8.2e-9 | 2.33e-12 | 1.17e-6 | 1.17e-6 | 1e-2 | 3.7e-4 |
3.34e-4 | 0.35 | 1.17e-4 | 0.13 | 2.3e-8 | 2.66e-11 | 2.33e-6 | 2.33e-6 | 2e-2 | 1.25e-3 |
3.34e-4 | 0.35 | 1.17e-4 | 0.10 | 8.6e-8 | 6.12e-10 | 3.5e-6 | 3.5e-6 | 3e-2 | 6e-3 |
V (volt) | Theory s (m) | experiment (m) |
|---|---|---|
1 | 0 | 0 |
2 | 0 | 0 |
3 | 0 | 0 |
4 | 0 | 0 |
5 | 2e-3 | 2e-3 |
6 | 1e-2 | 1e-2 |
7 | 2e-2 | 2e-2 |
8 | 3e-2 | 3e-2 |
V (volt) | current (A) | maximum distance (m) | mass (kg) |
|---|---|---|---|
5 | 0.85 | 2.00E-03 | 3.40E-05 |
5 | 0.87 | 2.00E-03 | 4.00E-05 |
5 | 0.88 | 1.00E-03 | 4.00E-05 |
5 | 0.86 | 2.00E-03 | 5.00E-05 |
V (volt) | current (A) | maximum distance (m) | mass (kg) |
|---|---|---|---|
6 | 0.89 | 1.00E-02 | 3.40E-05 |
6 | 0.93 | 1.00E-02 | 4.00E-05 |
6 | 0.94 | 1.00E-02 | 4.00E-05 |
6 | 0.92 | 1.00E-02 | 5.00E-05 |
V (volt) | current (A) | maximum distance (m) | mass (kg) |
|---|---|---|---|
7 | 0.92 | 2.00E-02 | 3.40E-05 |
7 | 0.96 | 2.00E-02 | 4.00E-05 |
7 | 1.03 | 2.30E-02 | 4.00E-05 |
7 | 1 | 2.10E-02 | 5.00E-05 |
V (volt) | current (A) | maximum distance (m) | mass (kg) |
|---|---|---|---|
8 | 1.04 | 0 | 3.40E-05 |
8 | 1.08 | 0 | 4.00E-05 |
8 | 1.12 | 0 | 4.00E-05 |
8 | 1.14 | 0 | 5.00E-05 |
Predict maximum distance (m) |
|---|
2.91E-02 |
2.82E-02 |
1.93E-02 |
1.96E-02 |
V (volt) | current (A) | maximum distance (m) | mass (kg) |
|---|---|---|---|
5 | 0.85 | 2.00E-03 | 3.40E-05 |
5 | 0.85 | 2.00E-03 | 3.40E-05 |
5 | 0.85 | 2.00E-03 | 3.40E-05 |
5 | 0.85 | 2.00E-03 | 3.40E-05 |
V (volt) | current (A) | maximum distance (m) | mass (kg) |
|---|---|---|---|
6 | 0.89 | 1.00E-02 | 3.40E-05 |
6 | 0.89 | 1.00E-02 | 3.40E-05 |
6 | 0.89 | 1.00E-02 | 3.40E-05 |
6 | 0.89 | 1.00E-02 | 3.40E-05 |
V (volt) | current (A) | maximum distance (m) | mass (kg) |
|---|---|---|---|
7 | 0.92 | 2.00E-02 | 3.40E-05 |
7 | 0.92 | 2.00E-02 | 3.40E-05 |
7 | 0.92 | 2.00E-02 | 3.40E-05 |
7 | 0.92 | 2.00E-02 | 3.40E-05 |
V (volt) | current (A) | maximum distance (m) | mass (kg) |
|---|---|---|---|
8 | 1.04 | 0 | 3.40E-05 |
8 | 1.04 | 0 | 3.40E-05 |
8 | 1.04 | 0 | 3.40E-05 |
8 | 1.04 | 0 | 3.40E-05 |
Predict maximum distance (m) |
|---|
2.5e-2 |
2.45e-2 |
2.45e-2 |
2.43e-2 |
Readings | Experiment maximum distance (m) | Maximum distance from data driven neural network (m) | Residual (R) | (R)2 |
|---|---|---|---|---|
Trial 1 | 3e-2 | 2.91e-2 | 9e-4 | 8.1e-7 |
Trial 2 | 3.1e-2 | 2.82e-2 | 2.8e-3 | 7.84e-6 |
Trail 3 | 3e-2 | 1.93e-2 | 1.07e-2 | 1.14e-4 |
Trail 4 | 3e-2 | 1.96e-2 | 1.04e-2 | 1.08e-4 |
Experiment maximum distance (m) | Maximum distance from PINN (m) | Residual (R) | (R)2 |
|---|---|---|---|
3e-2 | 2.5e-2 | 5.00E-03 | 2.50E-05 |
3.1e-2 | 2.45e-2 | 6.50E-03 | 4.23E-05 |
3e-2 | 2.45e-2 | 5.50E-03 | 3.03E-05 |
3e-2 | 2.43e-2 | 5.70E-03 | 3.25E-05 |
SMPS | Switched Mode Power Supply |
ML | Machine Learning |
SVR | Support Vector Regression |
DL | Deep Learning |
PINN | Physics Informed Neural Network |
RMSE | Root Mean Square Error |
| [1] | M. A. Abkowitz, Electronic transport in polymers, Philosophical Magazine B, 65, 817-829, 1992. |
| [2] | A. Babel, S. A. Jenekhe, High Electron Mobility in Ladder Polymer Field-Effect Transistors, J. Am. Chem. Society, 125, 45, 13656–13657, 2003. |
| [3] | S. Prodhan, A. Troisi, Effective Model Reduction Scheme for the Electronic Structure of Highly Doped Semiconducting Polymers, J. Chem. Theory Computation, 20, 10147–10157, 2024. |
| [4] | F. Jeschull, C. Hub et al., Multivalent Cation Transport in Polymer Electrolytes – Reflections on an Old Problem, Advanced Energy Materials, 14, 2302745, 2024. |
| [5] | H. L. Frisch, C. E. Rogers, Transport in polymers, Journal of Polymer Science Part C: Polymer Symposia, 12, 1966. |
| [6] | E. Guyon, J. P. Nadal, Y. Pomeau, Disorder and Mixing: Convection, Diffusion and Reaction in Random Materials and Processes, NATO ASI Series E: Applied Sciences, 152, Springer, 1988. |
| [7] | A. Korolkovas, P. Gutfreund, J. L. Barrat, Simulation of entangled polymer solutions, J. Chem. Phys. 145, 124113, 2016. |
| [8] | S. Allen, S. D. A. Connell, X. Chen, J. Davies, M. C. Davies, A. C. Dawkes, C. J. Roberts, S. J. B. Tendler, P. M. Williams, Mapping the surface characteristics of polystyrene microtiter wells by a multimode scanning force microscopy approach, Journal of Colloid and Interface Science, 242, 470-476, 2001. |
| [9] | G. D. Wignall, D. G. H. Ballard, J. Schelten, Chain conformation in molten and solid polystyrene and polyethylene by low-angle neutron scattering, Journal of Macromolecular Science, Part B, 12, 75-98, 1976. |
| [10] | S. C. Carroccio, P. Cerruti, M. Cervello, A. Cuttitta, P. Colombo, V. Longo, Photoaging of polystyrene-based microplastics amplifies inflammatory response in macrophages, Chemosphere, 364, 1-9, 2024. |
| [11] | S. Anguissola, D. Garry, A. Salvati, P. J. O Brien, K. A. Dawson, High Content Analysis Provides Mechanistic Insights on the Pathways of Toxicity Induced by Amine-Modified Polystyrene Nanoparticles, Plos One, 9, 1-16, 2014. |
| [12] | I. Marusic, D. Chandran, A. Rouhi, M. K. Fu, D. Wine, B. Holloway, D. Chung, A. J. Smits, An energy-efficient pathway to turbulent drag reduction, Nature Communications, 12, 1-8, 2021. |
| [13] | M. P. Ciamarra, A. H. Lara, A. T. Lee, D. I. Goldman, I. Vishik, H. L. Swinney, Dynamics of Drag and Force Distributions for Projectile Impact in a Granular Medium, Phys. Rev. Lett. 92, 194301, 2004. |
| [14] | M. Di Renzo, J. Urzay, Aerodynamic generation of electric fields in turbulence laden with charged inertial particles, Nature Communications, 9, 1-11, 2018. |
| [15] | L. Ding, L. F. Sabidussi, B. C. Holloway, A. J. Smits Acceleration is the key to drag reduction in turbulent flow, PNAS, 121, e2403968121, 2024. |
| [16] | P. Denissenko, S. T. Harvey, An aeroelastic wind energy harvester with continuous orbiting motion and no friction components, Scientific Reports, 15, 34432, 2025. |
| [17] | T. B. Martin, D. J. Audus, Emerging Trends in Machine Learning: A Polymer Perspective, ACS Polym. Au. 3, 3, 239–258, 2023. |
| [18] | W. Ge, R. D. Silva, Y. Fan, S. A. Sisson, M. H. Stenzel, Machine Learning in Polymer Research, Advanced Materials, 37, 2413695, 2025. |
| [19] | R. S. V. D. Hurk, B. W. J. Pirok, T. S. Bos, The role of artificial intelligence and machine learning in polymer characterization: emerging trends and perspectives, Chromatographia, 88, 357–363, 2025. |
| [20] | D. C. Struble, B. G. Lamb, B. Ma, A prospective on machine learning challenges, progress, and potential in polymer science, MRS Communications, 14, 752–770, 2024. |
| [21] | B. G. Sumpter, D. W. Noid, Neural networks and graph theory as computational tools for predicting polymer properties, Macromolecular Theory and Simulations, 3, 363-378, 1994. |
| [22] | P. Reiser, M. Neubert, A. Eberhard, L. Torresi, C. Zhou, C. Shao, H. Metni, C. van Hoesel, H. Schopmans, T. Sommer, P. Friederich, Graph neural networks for materials science and chemistry, Communications Materials, 3, 1-18, 2022. |
| [23] | T. A. Meyer, C. Ramirez, M. J. Tamasi, A. J. Gormley, A Users Guide to Machine Learning for Polymeric Biomaterials, ACS Polym. Au, 3, 141–157, 2023. |
| [24] | I. M. Ward, J. Sweeney, Mechanical Properties of Solid Polymers, Third Edition, John Wiley and Sons, Ltd, 2013. |
| [25] | C. Lodato, F. Magionesi, G. Marsala, A novel energy harvesting technology from the movements of air masses, Discover Applied Sciences, 6, 1-21, 2024. |
| [26] | J. C. Vidal, J. Midon, A. B. Vidal, D. Ciomaga, F. Laborda, Detection, quantification, and characterization of polystyrene microplastics and adsorbed bisphenol A contaminant using electroanalytical techniques, Microchim Acta, 190, 1-10, 2023. |
| [27] | A. Motalebizadeh, S. Fardindoost, M. Hoorfar, Selective on-site detection and quantification of polystyrene microplastics in water using fluorescence-tagged peptides and electrochemical impedance spectroscopy, Journal of Hazardous Materials, 480, 136004, 2024. |
| [28] | C. Mayorga, S. M. Athalye, M. Boodaghidizaji, N. Sarathy, M. Hosseini, A. Ardekani, M. S. Verma, Limit of Detection of Raman Spectroscopy Using Polystyrene Particles from 25 to 1000 nm in Aqueous Suspensions, Anal. Chem., 97, 8908–8914, 2025. |
| [29] | G. A. Sziki, K. Sarvajcz, J. Kiss, T. Gal, A. Szanto, A. Gabora, G. Husi, Experimental investigation of a series wound DC motor for modeling purpose in electric vehicles and mechatronics systems, Measurement, 109, 111-118, 2017. |
| [30] | R Morales, J A Somolinos, H S Ramirez, Control of a DC motor using algebraic derivative estimation with real time experiments, Measurement, 47, 401-417, 2014. |
| [31] |
Aerodynamic drag parameters study Available from:
https://web.mit.edu/8.13/8.13c/references-fall/aip/aip-handbook-section2d.pdf (accessed 12 January 2026). |
APA Style
Vishal, N. V. R. (2026). Transport of Polystyrene Polymer with DC Motor Having Rollers. Engineering and Applied Sciences, 11(2), 48-64. https://doi.org/10.11648/j.eas.20261102.11
ACS Style
Vishal, N. V. R. Transport of Polystyrene Polymer with DC Motor Having Rollers. Eng. Appl. Sci. 2026, 11(2), 48-64. doi: 10.11648/j.eas.20261102.11
@article{10.11648/j.eas.20261102.11,
author = {Nandigana Venkata Raghavendra Vishal},
title = {Transport of Polystyrene Polymer with DC Motor Having Rollers},
journal = {Engineering and Applied Sciences},
volume = {11},
number = {2},
pages = {48-64},
doi = {10.11648/j.eas.20261102.11},
url = {https://doi.org/10.11648/j.eas.20261102.11},
eprint = {https://article.sciencepublishinggroup.com/pdf/10.11648.j.eas.20261102.11},
abstract = {In this paper, we study the transport of polystyrene polymer. They are transported using non contact method. We use DC motor having rollers. The motor is connected to switched mode power supply (SMPS) and controller. The voltage of the SMPS is 12 V. The controller controls the voltage of the motor. We study voltage of the motor from 1 V to 8 V. The motor have capacity of 12 V. The current of the motor at 12 V are 1.2 A. The switched mode power supply have electrical plug. We supply 220 V AC supply to SMPS. They have AC to DC converter. Here, the length of the polystyrene is 2 cm, width 2 cm and thickness is 0.082 mm. The mass is measured. We observe the polystyrene do not move from 1 V to 4 V. The transport is from 0.2 cm to 3 cm under the application of 5 V to 8 V, respectively. Further movement are not observed. The multimeters are used to measure the current-voltage characteristics of the motor. They are used to measure the voltage of the SMPS. In this paper, we develop theory to understand the transport of polystyrene under the action of DC motor. We develop two neural network models. The data driven neural network and physics from theory informed in the neural network. The neural network model match the experiments. The accuracy is good. Our simulations use less computer power and time. The training time is 30 s and predict time is 0.07 s. Our work can find applications in printing, packaging, decor, energy, sensors and material handling industries.},
year = {2026}
}
TY - JOUR T1 - Transport of Polystyrene Polymer with DC Motor Having Rollers AU - Nandigana Venkata Raghavendra Vishal Y1 - 2026/03/19 PY - 2026 N1 - https://doi.org/10.11648/j.eas.20261102.11 DO - 10.11648/j.eas.20261102.11 T2 - Engineering and Applied Sciences JF - Engineering and Applied Sciences JO - Engineering and Applied Sciences SP - 48 EP - 64 PB - Science Publishing Group SN - 2575-1468 UR - https://doi.org/10.11648/j.eas.20261102.11 AB - In this paper, we study the transport of polystyrene polymer. They are transported using non contact method. We use DC motor having rollers. The motor is connected to switched mode power supply (SMPS) and controller. The voltage of the SMPS is 12 V. The controller controls the voltage of the motor. We study voltage of the motor from 1 V to 8 V. The motor have capacity of 12 V. The current of the motor at 12 V are 1.2 A. The switched mode power supply have electrical plug. We supply 220 V AC supply to SMPS. They have AC to DC converter. Here, the length of the polystyrene is 2 cm, width 2 cm and thickness is 0.082 mm. The mass is measured. We observe the polystyrene do not move from 1 V to 4 V. The transport is from 0.2 cm to 3 cm under the application of 5 V to 8 V, respectively. Further movement are not observed. The multimeters are used to measure the current-voltage characteristics of the motor. They are used to measure the voltage of the SMPS. In this paper, we develop theory to understand the transport of polystyrene under the action of DC motor. We develop two neural network models. The data driven neural network and physics from theory informed in the neural network. The neural network model match the experiments. The accuracy is good. Our simulations use less computer power and time. The training time is 30 s and predict time is 0.07 s. Our work can find applications in printing, packaging, decor, energy, sensors and material handling industries. VL - 11 IS - 2 ER -
Department of Mechanical Engineering, Indian Institute of Technology Madras, Chennai, India
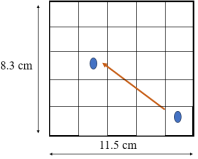
Figure 1. Schematic representation of transport of the polystyrene.

Figure 2. Experiment set up.
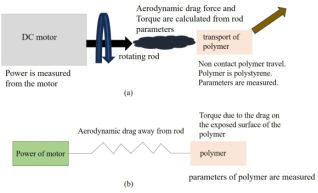
Figure 3. (a) Schematic understanding of the power of the DC motor to displacement of polystyrene polymer (b) Circuit representation of the power of the motor, aerodynamic drag away from the rod and displacement of the polystyrene polymer.
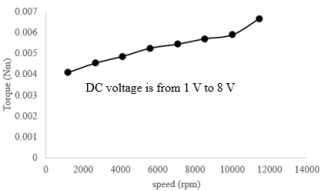
Figure 4. Speed relation with the torque of the motor.
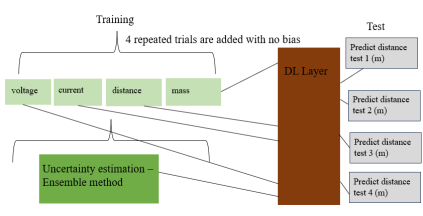
Figure 5. Schematic of Data Driven Neural Network.
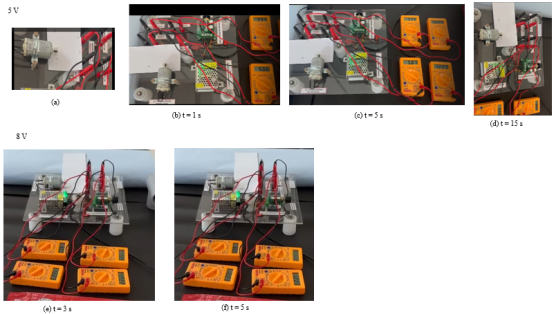
Figure 6. (a-d) Transport for DC = 5 V (a) close picture of polystyrene non contact with the DC motor (b) time, t = 1 s (c) t = 5 s (d) t = 15 s. (e-f) Transport for DC = 8 V (a) move to cm distance observed for polystyrene in non contact drive by DC motor. (e) t = 3 s (f) t = 5 s.
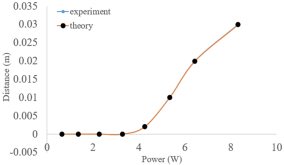
Figure 7. Comparison of the maximum distance of the polystyrene between experiments and theory. The distance is shown for different power of the DC motor.
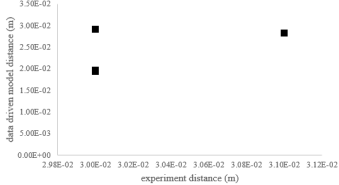
Figure 8. Comparison of the maximum distance of the polystyrene between experiments and data driven neural network. The voltage of the motor is 8 V. We obtain results for different trials.
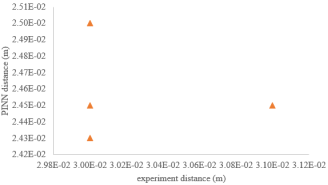
Figure 9. Comparison of the maximum distance of the polystyrene between experiments and physics from theory in the neural network. The voltage of the motor is 8 V. We obtain results for different trials.




